

4.36 Kooperative førerstøttesystemer
Kooperative førerstøttesystemer kommuniserer direkte med kommunikasjonsenheter i andre kjøretøy eller i infrastrukturen. Med kooperativ autonom avstandsregulering kan biler kobles sammen elektronisk og kjøre med samme fart og korte tidsluker. Simuleringsstudier tyder på at dette kan redusere påkjøring bakfra ulykker med 67-99%.
Problem og formål
Førernes manglende oppfattelse av relevant informasjon og feilvurderinger er blant de vanligste medvirkende faktorer til trafikkulykker. For eksempel holder mange førere for kort avstand til forankjørende, noe som kan øke risikoen for påkjøring bakfra.
Kooperative førerstøttesystemer er systemer som innhenter informasjon fra omgivelsene – enten fra andre kjøretøy eller fra infrastruktur – og dermed støtter føreren ved observasjon i trafikken og som delvis også kan overta andre føreroppgaver som å holde bilen i kjørefeltet eller en viss avstand til forankjørende. Systemene kan enten kommunisere fra kjøretøy til kjøretøy, fra infrastruktur til kjøretøy, eller fra omgivelsene til kjøretøy. Systemene kalles kooperative fordi de kommuniserer med enheter i andre kjøretøy eller infrastruktur.
Formålet med kooperative førerstøttesystemer er å redusere ulykker ved å gi føreren og/eller kjøretøyet relevant informasjon om trafikkmiljøet, slik at man unngår å overse andre kjøretøy eller trafikanter, eller feilbedømme tid eller avstand. Et annet formål, spesielt med kooperativ autonom avstandskontroll, er å bedre framkommeligheten og redusere energiforbruket.
Beskrivelse av tiltaket
Det finnes ulike typer kooperative systemer med ulike formål. Fellesnevneren er at systemene kan utveksle informasjon:
- Med andre kjøretøy, også omtalt som car to car (c2c) eller vehicle to vehicle (v2v) communication, eller
- Med infrastruktur, også omtalt som car to infrastructure (c2i eller v2i) communication.
Et eksempel på et kooperativt førerstøttesystem er kooperativ autonom avstandsregulering (cooperative autonomous cruise control (CACC)). Dette er et system der kjøretøy kan kommunisere med hverandre og er utstyrt med autonom avstandsregulering. Bilene kan da koble seg sammen i en kolonne der alle holder samme fart og konstante og identiske tidsluker.
Slike systemer er ennå ikke tatt i bruk i trafikk i stort nok omfang til at virkninger på ulykkene kan måles. Virkningene er derfor undersøkt i simuleringsstudier.
Andre avanserte førerstøttesystemer som ikke er kooperative og som er omtalt i andre kapitler er (med kapittelnummer): Autonom avstandsregulering og automatisk nødbrems (4.18), Antiskrenssystemer (4.29), Førerstøttesystemer for motorsykler (4.31), Feltskiftevarsler, blindsonevarsler og ryggekamera (4.32), Intelligent fartstilpasning (4.33), Varsling for myke trafikanter med automatisk nødbrems (4.37). Selvkjørende biler er omtalt i kapittel 4.38.
Virkning på ulykker
Ved kjøring i tett trafikk holder mange førere kort avstand til forankjørende. På denne måten utnyttes vegkapasiteten effektivt og man unngår at andre smetter inn i mellomrommet mellom egen bil og forankjørende bil. Korte avstander fungerer godt så lenge alle holder samme fart, men kan drastisk øke risikoen for ulykker ved uventet bremsing. Dette er forsøkt vist i figur 4.36.1.
Forklaringen på økt ulykkesrisiko ved korte tidsluker, er at førernes reaksjonstider hoper seg opp. Fører nummer to i en kø reagerer på at fører nummer en bremser. Fører nummer tre kan ikke reagere før fører nummer to har reagert, fører nummer fire kan ikke reagere før fører nummer tre har reagert, og så videre. På denne måten hoper reaksjonstidene seg opp og sikkerhetsmarginen forsvinner.
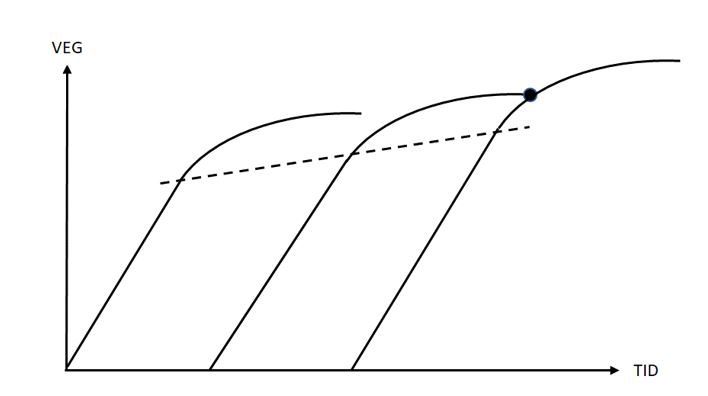
Figur 4.36.1: Opphopning av føreres reaksjonstider ved bremsing i tett trafikk.
Opphopningen av reaksjonstider er vist ved den stiplede linjen i figur 4.36.1. Ved kooperativ autonom avstandsregulering unngår man opphopning av reaksjonstider. Siden bilene er koblet sammen elektronisk, reagerer de alle momentant og samtidig når første bil i en kolonne bremser. Den stigende stiplede linjen i figur 4.36.1 blir da vannrett. Gitt av sikkerhetsmarginene i tett trafikk der førerne selv velger dem ofte er for små, er det opplagt at kooperativ autonom avstandsregulering kan redusere ulykkesrisikoen, spesielt for påkjøring bakfra ulykker.
Figur 4.36.2 viser resultater av tre simuleringsstudier der endringer i antall konflikter er studert som funksjon av hvilken andel av bilene som er utstyr med kooperativ autonom avstandsregulering (Abdel-Aty et al., 2020; Li et al., 2017; Papadoulis et al., 2019).
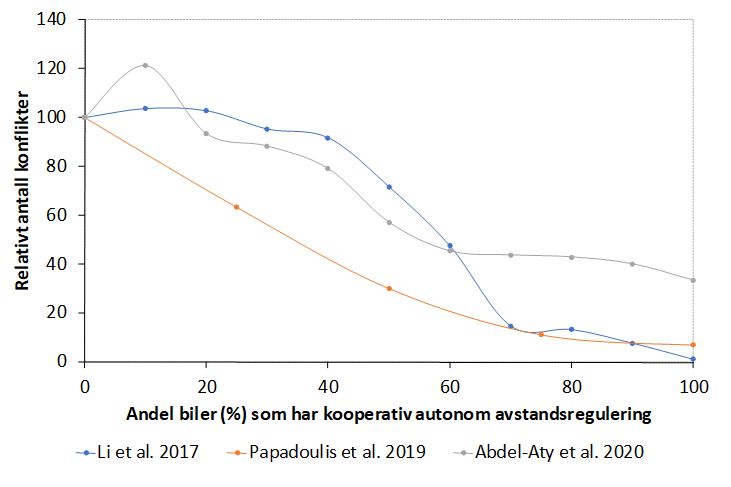
Figur 4.36.2: Endringer i antall konflikter mellom biler på motorveg som funksjon av andel av biler som har kooperativ autonom avstandsregulering.
Alle studier i figur 4.36.2 viser at kooperativ autonom avstandsregulering kan redusere konflikter mellom biler på motorveger betydelig. Ved 100% utbredelse av kooperativ autonom avstandsregulering kan antall konflikter være redusert med 67 – 99%. Dette gjelder konflikter som potensielt kan føre til påkjøring bakfra. I Norge utgjør påkjøring bakfra 20% av alle skadde og drepte i trafikkulykker og 5% av alle drepte og hardt skadde i trafikkulykker. Det betyr at teoretisk kan antall skadde og drepte være redusert med 13-19% og antall drepte og hardt skadde kan være redusert med 3-5% dersom alle biler hadde kooperativ autonom avstandsregulering.
Det er i studiene forutsatt at biler som er elektronisk koblet sammen i en kolonne har en tidsluke på 0,6 sekunder og at systemet har en reaksjonstid på 0,1-0,3 sekunder. For biler styrt av førere er det forutsatt tidsluker på 0,9-1,4 sekunder og en reaksjonstid på 1,5 sekunder. Det betyr at man har forutsatt at førerne kjører med en negativ sikkerhetsmargin og at ikke en gang andre fører i en kø rekker å reagere i tide når første fører bremser. Det er innlysende at potensialet for å redusere ulykker blir stort når man forutsetter at førerne i dag kjører med en negativ sikkerhetsmargin.
Ingen av studiene har drøftet muligheten for atferdstilpasning, ved at førere reduserer tidslukene når de kjører i et kjørefelt ved siden av et kjørefelt der kooperativt koblede biler har korte tidsluker (Gouy et al., 2014).
Simulering kan overvurdere virkninger av tiltak. I en metaanalyse av førerstøttesystemer der virkningene er beregnet gjennom simulering eller teoretiske betraktninger, oppgir Wang et al. (2020) virkningen av feltskiftevarsler til 24% ulykkesnedgang, mens empiriske studier i gjennomsnitt finner virkninger på rundt -5% (jf. kapittel 4.32 om feltskiftevarsler). Wang et al. (2020) oppgir ulykkesnedgangen ved fotgjengerdetektering og bremsing til 39%, mens ulykkesstudier finner en nedgang på 13%. Flere eksempler kunne ha vært nevnt.
Virkning på framkommelighet
Kooperativ autonom avstandsregulering gjør det mulig å ha kortere tidsluker i tett trafikk og unngå forstyrrelser i trafikkavviklingen ved at alle biler holder samme fart. Dette øker vegkapasiteten og kan forkorte reisetiden. Elvik et al. (2020) anslår en mulig reisetidsbesparelse på opptil 17% på motorveger når alle biler har kooperativ autonom avstandsregulering. I bytrafikk vil reisetidsbesparelsen være mindre på grunn av hyppige kryss og gangfelt der trafikksignaler eller vikepliktregler medfører stans.
Virkning på miljøforhold
Dersom biler kjører svært tett etter hverandre, reduseres luftmotstanden og turbulens fra forankjørende. Dette kan redusere drivstofforbruket, spesielt for tunge biler. Slowik og Sharpe (2018) oppsummerer ti studier av hvordan kjøring i en elektronisk kolonne (platoon) påvirker drivstofforbruk for lastebiler. I gjennomsnitt ble det funnet en reduksjon på 11,8%. Reduksjonen varierte mellom 2,8% og 22%. Jevnere fart med mindre bremsing og akselerasjon kan også redusere trafikkstøy.
Kostnader
Det er vanskelig å finne kostnadstall for kooperative førerstøttesystemer. Bilprodusentene oppgir normalt ikke hva de enkelte komponenter eller systemer i en bil koster. På grunnlag av ulike anslag på hva full automatisering av en bil vil koste (Elvik 2020), kan det grovt anslås at de samlede kostnader ved de førerstøttesystemer som er omtalt i dette kapitlet kan være i størrelsesorden 50.000-100.000 kroner per bil.
Nytte-kostnadsvurderinger
Det er ikke funnet nyttekostnadsanalyser av kooperative førerstøttesystemer. Det kan likevel gjøres noen betraktninger om forholdet mellom nytte og kostnader for disse systemene. Den gjennomsnittlige ulykkeskostnaden for en personbil er ca. 0,25 kroner per kilometer (Rødseth et al., 2019). Regner man at en bil kjører 200.000 kilometer før den skrotes, blir ulykkeskostnaden i bilens brukstid på 50.000 kroner. Dersom man antar at bilen brukes i 20 år og diskonterer ulykkeskostnadene med en kalkulasjonsrente på 4% per år, blir nåverdien av ulykkeskostnadene 34.000 kroner.
En reduksjon av ulykkeskostnadene med 20% gir en besparelse på omkring 6.800 kroner per bil (nåverdi regnet over 20 år). Dersom førerstøttesystemene koster mer enn dette, er nytten for trafikksikkerheten mindre enn kostnadene. Dersom man i tillegg tar hensyn til nytten i form av redusert drivstofforbruk, vil nytten være betydelig større og kostnadene kan følgelig også være større uten at de overstiger nytten. Som nevnt over, er kostnadene lite kjent.
Formelt ansvar og saksgang
Initiativ til tiltaket
Bilprodusentene tar initiativ til utvikling av nye førerstøttesystemer. Ingen av de systemer som er omtalt i dette kapitlet er foreløpig gjort til et krav om at alle biler skal ha systemene. Initiativ til å kreve et påbud om nytt sikkerhetsutstyr i nye biler tas av internasjonale organer, for Europas del enten FNs økonomiske kommisjon for Europa eller EU-kommisjonen.
Formelle krav og saksgang
Krav til kjøretøy fastsettes i Kjøretøyforskriften. Myndigheten til å endre Kjøretøyforskriften er delegert til Vegdirektoratet. Forvaltningslovens bestemmelser om saksgang ved endring av forskrifter må følges. I praksis er Kjøretøyforskriften i dag en del av EUs lovverk. Når EU vedtar nye krav til kjøretøy, blir disse gjennom EØS-avtalen automatisk iverksatt i Norge.
Ansvar for gjennomføring av tiltaket
Så lenge førerstøttesystemer ikke er påbudt, er det opp til bilprodusentene hvilke systemer de vil tilby. Det er dermed opptil forbrukerne å velge mellom biler som har ulike førerstøttesystemer. Det er vanlig at nye førerstøttesystemer først tilbys på de dyreste bilmodellene og deretter, hvis de selger godt, tilbys på rimeligere modeller.
Dersom et førerstøttesystem blir påbudt, må det tilbys som standardutstyr. Biler med systemet vil da bli typegodkjent. Produsenter og importører av biler er ansvarlige for at bilene er i samsvar med typegodkjenningen. Statens vegvesen kan utføre stikkprøver av typegodkjente kjøretøy for å kontrollere at godkjenningen overholdes.
Referanser
Abdel-Aty, M., Wu, Y., Saad, M. & Rahman, M. S. 2020. Safety and operational impact of connected vehicles’ lane configuration on freeway facilities with managed lanes. Accident Analysis and Prevention, 144, 105616.
Elvik, R. 2020. The demand for automated vehicles: A synthesis of willingness-to-pay surveys. Economics of Transportation, 23, 100179.
Elvik, R., Meyer, S. F., Hu, B., Ralbovsky, M., Vorwagner, A., Boghani, H. 2020. Methods for forecasting the impacts of connected and automated vehicles. Deliverable D3.2 of the H2020 project Levitate.
Gouy, M., Wiedemann, K., Stevens, A., Brunett, G., Reed, N. 2014. Driving next to automated vehicle platoons: How do short time headways influence non-platoon drivers’ longitudinal control? Transportation Research Part F, 264-273.
Li, Y., Wang, H., Wang, W., Xing, L., Liu, S-. & Wei, X. 2017. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways. Accident Analysis and Prevention, 98, 87-95.
Papadoulis, A., Quddus, M. & Imprialou, M. 2019. Evaluating the safety effect of connected and autonomous vehicles on motorways. Accident Analysis and Prevention, 124, 12-22.
Rødseth, K. L., Wangsness, P. B., Veisten, K., Høye, A., Elvik, R., Klæboe, R., Thune‑Larsen, H., Fridstrøm, L., Lindstad, E., Rialland, A., Odolinski, K., Nilsson, J-E. 2019. Eksterne skadekostnader ved transport i Norge. Rapport 1704. Oslo, Transportøkonomisk institutt.
Slowik, P., Sharpe, B. 2018. Automation in the long haul: Challenges and opportunities of autonomous heavy-duty trucking in the United States. Working paper 2018-06. International Council on Clean Transportation.
Wang, L., Zhong, H., Abdel-Aty, M. & Park, J. 2020. How many crashes can connected vehicle and automated vehicle technologies prevent: A meta-analysis. Accident Analysis and Prevention, 136, 105299.