

8.16 Belønning av sikker kjøring

Belønning av sikker kjøring, eksempelvis i form av redusert forsikringspremie, er i dag teknisk mulig ved å installere utstyr som registrerer kjøreatferd og gjør disse opplysningene tilgjengelige for den som tildeler belønning. Forsøk viser at det er mulig å rekruttere førere til belønningsordninger. Gjennom slike ordninger er det oppnådd reduserte fartsovertredelser, redusert kjørelengde og økt avstand til forankjørende. Endringer i ulykkestall er ikke undersøkt, men kan antas å ligge i størrelsesorden 5-15% nedgang. Nytten av belønningsordninger er mindre enn kostnadene dersom utbetaling av belønning regnes som en del av kostnaden ved tiltaket.
Problem og formål
Overtredelser av vegtrafikklovgivningen og annen uforsiktig atferd i trafikken bidrar vesentlig til trafikkulykker og skader. Det er beregnet at dersom man kunne eliminere 15 nærmere angitte trafikkforseelser, blant dem fartsovertredelser, promillekjøring og manglende bruk av bilbelter, så kan antall drepte reduseres med vel 50% og antall skadde med vel 30% (Elvik, 2010). Mange trafikkforseelser eller andre former for uforsiktig atferd i trafikken begås fordi trafikantene oppnår en fordel ved slik atferd og vet at sjansen for å bli tatt av politiet er svært liten. Det er ikke mulig for politiet å kontrollere alle trafikanter overalt og til enhver tid. Det er heller ikke realistisk å tenke seg at automatiske kontrolltiltak, som automatisk fartskontroll, kan få et vesentlig større omfang enn det har i dag.
Spørsmålet er derfor om man kan fremme sikrere atferd i trafikken på annen måte enn ved kontroll og sanksjoner. De siste årene er mulighetene for å belønne sikker atferd i trafikken blitt vesentlig bedre enn før. Belønning av sikker atferd krever at atferden kan observeres. Teknologi som gjør dette mulig blir stadig billigere og mer pålitelig. Det er derfor utført en rekke forsøk der man har belønnet trafikanter for sikker atferd. De former for atferd man har belønnet er overholdelse av fartsgrenser, reduksjon av kjørelengden, avstand til forankjørende, at man ikke kjører i mørke og at man unngår å kjøre i de mest trafikkerte timer i rushtiden.
Formålet med å belønne sikker atferd i trafikken er å stimulere til slik atferd og derigjennom bidra til færre ulykker og skader i trafikken.
Beskrivelse av tiltaket
Det vanligste opplegg for å belønne sikker atferd er som følger. Først registreres atferden i en periode der belønning ikke gis. Hensikten med dette er å få vite hva den normale atferden er, det vil si atferd når belønning ikke gis. Deretter trer belønning for sikker atferd i kraft. Belønningens størrelse har variert en god del i de forsøk som hittil er utført. Den høyeste belønningen, opp til 700 Euro (om lag 7 000 kroner), ble tilbudt i et dansk forsøk (Lahrmann et al., 2012B). Belønningssystemene er vanligvis utformet slik at man bare kan oppnå den maksimale belønningen ved alltid å utføre den atferd som belønnes. Gjelder det overholdelse av fartsgrenser, må man alltid overholde fartsgrensene. Hver gang man bryter en fartsgrense, trekkes det fra et beløp fra belønningen. Bryter man ofte fartsgrensen, går hele belønningen tapt.Belønning for sikker atferd er i de fleste forsøk gitt i form av utbetaling av penger, men også andre former for belønning, som billetter til ulike aktivitets- eller underholdningstilbud har vært benyttet. Mange belønningsforsøk er støttet av forsikringsselskap i form av premierabatt.
Virkning på ulykkene
De resultater som presenteres i dette kapitlet bygger på følgende undersøkelser:
Buxbaum, 2006 (USA): Reduksjon av kjørelengde
Mazureck & van Hattem, 2006 (Nederland): Overholdelse av fartsgrenser og avstand til forankjørende
Reese & Pash-Brimmer, 2009 (USA): Reduksjon av kjørelengde
Ben-Elia & Ettema, 2011 (Nederland): Ikke kjøre i mest trafikkerte timer i rushtiden
Bolderdijk et al., 2011 (Nederland): Overholdelse av fartsgrenser, reduksjon av kjørelengde, ikke kjøre i mørke
Hultkrantz & Lindberg, 2011 (Sverige): Overholdelse av fartsgrenser
Lahrmann et al., 2012A (Danmark): Overholdelser av fartsgrenser
Greaves, Fifer & Ellison, 2013 (Australia): Overholdelse av fartsgrenser, reduksjon av kjørelengde, ikke kjøre i mørke
Stigson et al., 2014 (Sverige): Overholdelse av fartsgrenser
Mortimer et al., 2018 (Australia): Overholdelse av fartsgrenser
De fleste av disse undersøkelsene (alle unntatt Stigson et al., 2014 og Mortimer et al., 2018) er gjennomgått kritisk og oppsummert av Elvik (2014A, 2014B) og Elvik og Ramjerdi (2014). Beskrivelsen nedenfor bygger på disse gjennomgangene, oppdatert med de nye undersøkelsene. Ingen av undersøkelsene har målt virkninger på ulykker. Man har kun målt virkninger på atferd som har en relativt godt kjent sammenheng med ulykker.
Overholdelse av fartsgrenser
De fleste forsøk gjelder overholdelse av fartsgrenser. Figur 8.16.1 viser sammenhengen mellom «effektiv belønning» og nedgang i hyppighet av fartsovertredelser (oppdatert fra Elvik & Ramjerdi, 2014).
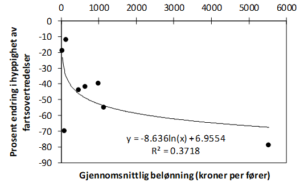
Figur 8.16.1: Sammenheng mellom effektiv belønning og nedgang i hyppighet av fartsovertredelser.
Belønningene er omregnet fra Euro til kroner ved å benytte en kurs på 10. Begrepet «effektiv belønning» kan forklares slik: I det mest effektive forsøket, der hyppigheten av fartsovertredelser ble redusert med 79%, var maksimal belønning 700 Euro (7000 kroner). Den maksimale belønningen kunne bare oppnås ved å slutte helt med fartsovertredelser. Siden nedgangen i fartsovertredelser var på 79% antas at førerne i gjennomsnitt oppnådde 79% av den maksimale belønningen, det vil si 553 Euro (5530 kroner).
Hyppigheten av fartsovertredelser betegner andelen av kjørte kilometer som var over fartsgrensen. Hvis denne andelen reduseres fra, for eksempel, 20% til 5%, representerer dette en nedgang i hyppigheten av fartsovertredelser på 75%.
Figur 8.16.1 viser at det kan oppnås en betydelig nedgang i fartsovertredelser ved å belønne førere for å overholde fartsgrensen. Det mest effektive forsøket er det danske (Lahrmann et al., 2012A). Dette forsøket er representert ved datapunktet lengst til høyre i figur 8.16.1. Selv om dette datapunktet utelates, er det en negativ sammenheng: jo større belønning, desto større nedgang i fartsovertredelser. For å gi et inntrykk av hva nedgangen i fartsovertredelser kan bety for antall ulykker, er endringer i gjennomsnittsfarten i den gruppe der forsøket hadde størst virkning benyttet. På veger med fartsgrense 80 km/t gikk gjennomsnittsfarten ned fra 80,5 til 77,3 km/t. Det tilsvarer en nedgang i antall personskadeulykker på ca. 13% (Elvik, 2019). På veger med fartsgrense 50 km/t gikk gjennomsnittsfarten ned fra 47,7 til 46,0 km/t. Det tilsvarer en nedgang i antall personskadeulykker på ca. 6%.
Reduksjon av kjørelengde
Det nest største antall forsøk gjelder reduksjon av kjørelengde. Figur 8.16.2 viser resultatene av disse forsøkene (Elvik og Ramjerdi, 2014).
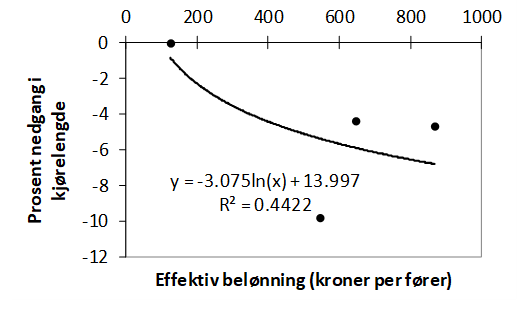
Figur 8.16.2: Sammenheng mellom effektiv belønning og nedgang i kjørelengde.
Det er en tendens til at nedgangen i kjørelengde øker når belønningen øker. Datapunktene viser likevel stor spredning rundt kurven som er føyd til dem. Den største nedgangen i kjørelengde som er oppnådd i noen av forsøkene er ca. 10%. Antall ulykker per fører per kilometer øker ikke proporsjonalt med hvor mange kilometer føreren kjører (Elvik, 2014C). En 10% nedgang i kjørelengde vil derfor normalt føre til en noe mindre nedgang i ulykkestall, omkring 3-6%.
Unngå å kjøre i mørke
To forsøk (Bolderdijk et al., 2011; Greaves, Fifer & Ellison, 2013) har belønnet førere for å unngå å kjøre i mørke. Ingen av forsøkene lyktes. Det ble ikke funnet noen nedgang i kjøring i mørke som følge av de belønninger som ble gitt. Den oppnåelige belønningen var imidlertid liten i begge forsøk.
Holde avstand til forankjørende
I et nederlandsk forsøk (Mazureck & van Hattem, 2006) ble førere belønnet for å holde tilstrekkelig avstand til forankjørende. Ved starten av forsøket økte andelen bilister som holdt tilstrekkelig avstand fra ca. 55% til ca. 80%. Virkningen ble gradvis svekket i løpet av forsøket (som varte i 16 uker) og ved slutten av det var andelen med tilstrekkelig avstand til forankjørende om lag 65%. Etter avslutning av forsøket forsvant virkningen helt.
Unngå å kjøre i rushtidstopp
Ett forsøk (Ben-Elia & Ettema, 2011) belønnet førere for å unngå å kjøre i de mest trafikkerte timene i rushtiden. Figur 8.16.3 viser nedgangen i kjøring i rushtidstopp som følge av effektiv belønning.
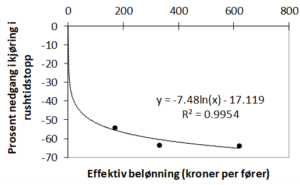
Figur 8.16.3: Sammenheng mellom effektiv belønning og nedgang i kjøring i rushtidstopp.
Det ble oppnådd en betydelig nedgang i andelen som kjørte i de mest trafikkerte timene i rushtiden. Ved de største belønningene var nedgangen på mer enn 60%. En rekke undersøkelser har forsøkt å finne ut om køer og rushtrafikk øker ulykkesrisikoen, det vil si om det skjer flere ulykker i køtrafikk enn økningen i trafikkmengde alene tilsier. Resultatene spriker en del og det er ikke mulig å trekke noen enkle konklusjoner om sammenhengen mellom køer og ulykkesrisiko. Det eneste resultatet som er konsistent er at ulykker er mindre alvorlige i kø enn ellers, noe som kan forklares med den lavere gjennomsnittsfarten. Det er følgelig ikke mulig å tallfeste hva den endrede atferden hos førere som ble belønnet for ikke å kjøre i rushtiden betyr for antall ulykker.
Sammenfattende kommentarer
De forsøkene som er omtalt foran viser at det er mulig å påvirke bilføreres atferd ved å gi belønning for ønsket atferd. Belønning kan både redusere fartsovertredelser, få førerne til å kjøre mindre, få dem til å holde god nok avstand til forankjørende og få dem til å avstå fra å kjøre i den tetteste rushtidstrafikken. Foreløpig ser det ikke ut til at belønning for ikke å kjøre i mørke virker.
Det må imidlertid understrekes at alle forsøk som hittil har vært gjort med belønning, har hatt et begrenset omfang. I de aller fleste forsøk har kun noen få hundre førere deltatt. Førerne har meldt seg frivillig til å delta. Man må anta at det er de mest motiverte som har meldt seg til å delta i forsøkene. Disse førerne vil, på grunn av sin motivasjon, trolig være lettere å påvirke med belønning enn mange andre førere. Det synes klart at de førere som meldte seg til forsøk med belønning for å holde fartsgrensene i Sverige og Danmark (Hultkrantz & Lindberg, 2011; Lahrmann et al., 2012A), hadde langt bedre respekt for fartsgrensene i utgangspunktet enn flertallet av førere. Disse førerne behøvde derfor ikke å endre sin atferd særlig mye for å oppnå en høy overholdelse av fartsgrenser.
Alt i alt er det sannsynlig at de virkninger av belønning som er presentert foran, gjelder spesielt motiverte førere. Det er uvisst om de virkninger som er oppnådd i en slik gruppe av førere kan generaliseres til førere i sin alminnelighet.
Virkning på framkommelighet
De former for atferd som hittil har vært belønnet, kan ha betydning for framkommeligheten. Lavere fart betyr lengre reisetid, men endringene i de belønningsforsøk som er omtalt i dette kapitlet er små. Eksempelvis ble reisetiden redusert med 9,7% blant førere som deltok i et belønningsforsøk i Sydney, Australia (Greaves, Fifer & Ellison, 2013), hovedsakelig som følge av at førerne reduserte kjørelengden med 9,8%. Endringen i reisetid per kilometer kjørt var derfor uhyre liten (0,903/0,902 = 0,1% økning).
Mindre trafikk på veger med stor trafikk kan bedre trafikkavviklingen. I de mest vellykkede forsøkene er antall kjørte kilometer redusert med 10%. Dette kan være tilstrekkelig til å redusere køer i rushtiden betydelig. På den annen side kan økt avstand mellom biler, slik man oppnådde i ett forsøk, bety redusert vegkapasitet. Alt i alt synes de belønningstiltak som hittil er forsøkt å ha beskjedne virkninger på framkommeligheten.
Virkning på miljøforhold
Både endret fart og endret trafikkmengde kan påvirke utslipp fra kjøretøy og dermed ha virkninger for miljøforhold. Mindre trafikk fører, alt annet likt, til at de totale utslipp reduseres. Farten til det enkelte kjøretøy påvirker også utslippene. Utslippene per kilometer per bil er jevnt over lavest når farten er omkring 60-80 km/t. Ujevn fart øker utslippene.
Kostnader
Kostnadene ved belønningssystemer er av tre typer:
- Kostnader ved å montere utstyr i bilen for å registrere førerens atferd.
- Kostnader ved å avlese utstyr som registrerer atferd og beregne den belønning en fører eventuelt kan få.
- Kostnader ved å utbetale belønninger.
Det kan diskuteres om utbetaling av belønning skal betraktes som en kostnad. Utbetaling av en belønning er ikke et vederlag for ressursbruk, kun en overføring. I samfunnsøkonomiske analyser (Boardman et al., 2011) skiller man mellom bruk av realressurser (tid, menneskelig arbeidskraft, naturressurser, realkapital) og overføringer. En overføring er ikke en samfunnsøkonomisk kostnad, siden overføringen ikke legger beslag på realressurser som har alternativ anvendelse.
Man kan likevel argumentere for å inkludere belønningene som en kostnad ved tiltaket, siden det neppe vil ha noen virkning hvis belønningene ikke utbetales. Utbetaling av belønning er med andre ord en nødvendig betingelse for at tiltaket skal ha virkning.
Kostnader ved installere utstyr i biler og avlese dette avhenger av hvor omfattende registreringer av atferd man ønsker å gjøre. I nyttekostnadsanalysen som presenteres i neste avsnitt, er følgende kostnader per bil lagt til grunn:
- Montering av utstyr: 1240 kroner per bil (124 Euro; kurs10)
- Avlesning av utstyr: 80 kroner per bil per år (8 Euro per bil)
- Belønning: tre nivåer ble definert: 165 kroner per fører, 2475 kroner per fører og 9900 kroner per fører (17, 248 og 990 Euro).
Nyttekostnadsvurderinger
Som tidligere nevnt, meldte førerne seg frivillig til de belønningsforsøk som er omtalt foran. Det er trolig ikke realistisk å tenke seg at et system for belønning av sikker kjøring kan iverksettes på annen måte enn ved frivillig deltakelse. Erfaring viser at det da er de sikreste førerne som først vil melde seg til å delta i et belønningssystem. Som grunnlag for å gjøre en nyttekostnadsanalyse av å belønne sikker kjøring, er det definert tre grupper av førere (Elvik, 2013):
- De 50% sikreste førere; disse førerne forutsettes å ha 20% lavere ulykkesrisiko enn gjennomsnittet for alle førere (relativ risiko = 0,8).
- De 40% nest sikreste førere; disse førerne forutsettes å ha 10% lavere ulykkesrisiko enn gjennomsnittet for alle førere (relativ risiko = 0,9).
- De 10% farligste førerne; disse førerne forutsettes å ha 140% høyere ulykkesrisiko enn gjennomsnittet for alle førere (relativ risiko = 2,4).
Disse antakelsene er i samsvar med studier som viser at det i en normal populasjon av bilførere vanligvis er slik at opp mot 90% av førerne er (litt) sikrere enn gjennomsnittsføreren, mens omkring 10% av førerne har betydelig høyere risiko enn gjennomsnittsføreren.
Med utgangspunkt i dose-responskurven i figur 8.16.1, som viser hvordan hyppigheten av fartsovertredelser blir redusert når belønningen øker, er det definert tre nivåer på belønning:
- En belønning på 17 Euro (165 kroner) per fører. Dette antas å redusere hyppigheten av fartsovertredelser med 20% (fra rundt regnet 50% til rundt regnet 40% av trafikken).
- En belønning på 248 Euro (2475 kroner) per fører. Dette antas å redusere hyppigheten av fartsovertredelser med 70% (fra 50% til 15% av trafikken).
- En belønning på 990 Euro (9900 kroner) per fører. Dette antas å redusere hyppigheten av fartsovertredelser med 95% (fra 50% til 2,5% av trafikken).
Ved å kombinere de tre gruppene av førere med de tre nivåene for belønning får man ni alternativer for et belønningssystem. Tabell 8.16.1 viser beregnet nyttekostnadsbrøk (nytte dividert med kostnader) for disse ni alternativene.
Tabell 8.16.1: Nyttekostnadsbrøk ved ulike belønningssystemer for overholdelse av fartsgrenser (Elvik, 2014B).
| Gruppe av førere | Lav belønning (165 kr) |
Middels belønning (2475 kr) |
Høy belønning (9900 kr) |
| Sikreste 50% | 0,44 | 0,30 | 0,11 |
| Sikreste 90% | 0,55 | 0,34 | 0,11 |
| Farligste 10% | 2,25 | 10,47 | 0,42 |
| Alle førere | 0,68 | 0,44 | 0,14 |
I analysen er det forutsatt at de 50% sikreste førerne først melder seg inn i belønningssystemet. Deretter melder de 40% nest sikreste førerne seg inn i systemet, slik at det omfatter 90% av førerne. Til slutt melder de 10% minst sikre førere seg inn i systemet, som da omfatter alle førere.
Tabell 8.16.1 viser at nytten er klart mindre enn kostnadene ved alle alternativer for belønningssystemet. Dersom man kan rekruttere de 10% minst sikre førere til et system med lav eller middels belønning, er nytten større enn kostnadene. Ved alle andre alternativer er nytten betydelig mindre enn kostnadene. Utbetaling av belønning er da regnet som en del av kostnaden ved tiltaket.
Resultatet kan muligens virke overraskende, siden det ofte hevdes at belønning er et mer effektivt virkemiddel for å påvirke atferd enn straff. Her må man imidlertid huske at det i gjennomsnitt er omkring 60% av førerne som allerede – uten noen form for belønning – overholder fartsgrensen. Disse førerne vil, fordi de overholder fartsgrensen, kvalifisere for belønning og få utbetalt dette i et belønningssystem. Disse utbetalingene kan, på en måte, regnes som bortkastede fordi mange av førerne uansett ville overholde fartsgrensen.
Velger man å holde utbetaling av belønning utenfor analysen, er alternativet med lav belønning fortsatt ulønnsomt (nytte mindre enn kostnader). Alternativene med middels og høy belønning har større nytte enn kostnader, dersom utbetaling av belønning ikke regnes som en kostnad.
Formelt ansvar og saksgang
Initiativ til tiltaket
De fleste av de belønningssystemer som er omtalt foran er iverksatt som forskningsprosjekter og dermed initiert av forskere. Det har vært hevdet (Desyllas & Sako, 2013) at «betal-som-du-kjører» (Pay-as-you-drive) er en god forretningsidé for forsikringsselskap. Det finnes flere eksempler på at forsikringsselskap har tilbudt forsikring der premien avhenger av førerens atferd. Et vilkår i slike forsikringsavtaler er at føreren må si seg villig til å installere utstyr i bilen som kan registrere atferd.
Erfaring viser at slike forsikringsordninger tiltrekker seg de sikreste og mest forsiktige førerne. Det er ikke overraskende. Det er forsiktige førere som vet at de vil ha lettest for å utføre den atferd som sikrer dem lav forsikringspremie.
Formelle krav og saksgang
Det er opp til forsikringsselskap å tilby forsikringsordninger som bygger på registrering av føreratferd. Slike forsikringer kan fremstå som mer aktuelle i dag enn tidligere, både fordi teknologien for å registrere føreratferd blir stadig mer avansert og billig, og fordi internasjonale reguleringer ikke lenger gjør det mulig for forsikringsselskapene å benytte kjønn som et kriterium for å beregne premier. I praksis betyr dette at unge kvinner betaler en altfor høy premie som subsidierer de tap forsikringsselskapene har på unge menn.
Ansvar for gjennomføring av tiltaket
Belønning av sikker kjøring har hittil først og fremst vært praktisert i bedrifter. Teknologien gjør det i økende grad mulig å belønne vanlige bilister. Det vil i første rekke være forsikringsselskap som kan betrakte belønning som aktuelt.
Referanser
Ben-Elia, E., Ettema, D. (2011) Changing commuters’ behaviour using rewards: A study of rush-hour avoidance. Transportation Research Part F, 14, 354-368.
Boardman, A. E., D. Greenberg, A. Vining and D. Reimer. (2011) Cost-benefit analysis. Concepts and practice. Fourth edition. Pearson Series in Economics. Boston, Prentice Hall.
Bolderdijk, J. W., Knockaert, J., Steg, E. M., Verhoef, E. T. (2011) Effects of Pay-As-You-Drive vehicle insurance on young drivers’ speed choice: Results of a Dutch field experiment. Accident Analysis and Prevention, 43, 1181-1186.
Buxbaum, J. (2006) Mileage-Based User Fee demonstration Project: Pay-as-you-drive experimental findings. Minnesota Department of Transportation, Research Report 2006-39A.
Desyllas, P., Sako, M. (2013) Profiting from business model innovation: Evidence from Pay-As-You-Drive auto insurance. Research Policy, 42, 101-116.
Elvik, R. (2010) Utviklingen i oppdagelsesrisiko for trafikkforseelser. Rapport 1059. Oslo, Transportøkonomisk institutt.
Elvik, R. (2013) Can it be true that most drivers are safer than the average driver? Accident Analysis and Prevention, 59, 301-308.
Elvik, R. (2014A) Rewarding safe and environmentally sustainable driving: a systematic review of trials. Transportation Research Record, 2465, 1-7.
Elvik, R. (2014B) Cost-benefit analysis of incentive systems rewarding compliance with speed limits. Transportation Research Record, 2465, 8-15.
Elvik, R. (2014C) Towards a general theory of the relationship between exposure and risk. Report 1316. Oslo, Institute of Transport Economics.
Elvik, R. (2019). A comprehensive and unified framework for analysing the effects on injuries of measures influencing speed. Accident Analysis and Prevention, 125, 63-69.
Elvik, R., Ramjerdi, F. (2014) A comparative analysis of the effects of economic policy instruments in promoting environmentally sustainable transport. Transport Policy, 33, 89-95.
Greaves, S., Fifer, S., Ellison, R. (2013) Exploring behavioural responses of motorists to risk-based charging mechanisms. Transportation Research Record, 2386, 52-61.
Hultkrantz, L. Lindberg, G. (2011) Pay-as-you-speed. An Economic Field Experiment. Journal of Transport Economics and Policy, 45, 415-436.
Lahrmann, H., Agerholm, N., Tradisauskas, N., Berthelsen, K. K., Harms, L. (2012A) Pay as You Speed, ISA with incentives for not speeding: Results and interpretation of speed data. Accident Analysis and Prevention, 48, 17-28.
Lahrmann, H., N. Agerholm, N. Tradisauskas, T. Næss, J. Juhl and L. Harms. (2012B) Pay as you speed, ISA with incentives for not speeding: A case of test driver recruitment. Accident Analysis and Prevention, 48, 10-16.
Mazureck, U., van Hattem, J. (2006) Rewards for Safe Driving Behavior. Influence on Following Distance and Speed. Transportation Research Record, 1980, 31-38.
Mortimer, D., Wijnands, J. S., Harris, A., Tapp, A., Stevenson, M. (2018). The effect of ‘smart’ financial incentives on driving behaviour of novice drivers. Accident Analysis and Prevention, 119, 68-79.
OECD Scientific Expert Group. (2006) Speed Management. Paris, Organisation for Economic Cooperation and Development.
Reese, C. A., Pash-Brimmer, A. (2009) North Central Texas pay-as-you-drive insurance pilot program. In: Pulugurtha, S. (Ed): Transportation, Land Use, Planning and Air Quality: Selected papers of the 2009 transportation, land use, planning and air quality conference, 41-50. American Society of Civil Engineers, Washington D. C.
Stigson, H., Hagberg, J., Kullgren, A., Krafft, M. 2014. A one year Pay-as-you-speed trial with economic incentives for not speeding. Traffic Injury Prevention, 15, 612-618.